16.11 Rotationer
SamverkanLinalgLIU
m |
|||
| (18 mellanliggande versioner visas inte.) | |||
| Rad 2: | Rad 2: | ||
| style="border-bottom:1px solid #797979" width="5px" | | | style="border-bottom:1px solid #797979" width="5px" | | ||
{{Mall:Ej vald flik|[[16.1 Definition av linjär avbildning|16.1]]}} | {{Mall:Ej vald flik|[[16.1 Definition av linjär avbildning|16.1]]}} | ||
| - | {{Mall:Ej vald flik|[[16.2 Matrisframställning|16.2 | + | {{Mall:Ej vald flik|[[16.2 Matrisframställning|16.2]]}} |
{{Mall:Ej vald flik|[[16.3 Projektion och spegling|16.3]]}} | {{Mall:Ej vald flik|[[16.3 Projektion och spegling|16.3]]}} | ||
{{Mall:Ej vald flik|[[16.4 Plan rotation|16.4]]}} | {{Mall:Ej vald flik|[[16.4 Plan rotation|16.4]]}} | ||
| Rad 17: | Rad 17: | ||
Läs textavsnitt [http://wiki.math.se/wikis/samverkan/linalg-LIU/img_auth.php/e/ea/Kap16_11.pdf 16.11 Rotationer] | Läs textavsnitt [http://wiki.math.se/wikis/samverkan/linalg-LIU/img_auth.php/e/ea/Kap16_11.pdf 16.11 Rotationer] | ||
| + | |||
| + | |||
| + | '''''Innan Du börjar arbeta med detta moment så kan Du se en filmvisning om rotation genom att klicka på bilden.''''' | ||
| + | |||
| + | <imagemap> | ||
| + | Bild:RotationFilm.png|450px|alt=Alt text | ||
| + | default [http://webcourses.itn.liu.se/webkurs/RotationFilm.jnlp Du se en filmvisning om rotation] | ||
| + | </imagemap> | ||
| + | |||
| + | |||
| + | |||
| + | '''''Du kan visualisera rotation genom att klicka på bilden.''''' | ||
| + | |||
| + | <imagemap> | ||
| + | Bild:Rotation.png|450px|alt=Alt text | ||
| + | default [http://webcourses.itn.liu.se/webkurs/Rotation.jnlp Du kan visualisera rotation] | ||
| + | </imagemap> | ||
| + | |||
| Rad 39: | Rad 57: | ||
# Bestäm <math>G</math>:s matris <math>B_{\boldsymbol{e}}</math> om <math>G</math> är en rotation <math>3\pi/2</math> i positiv led runt <math>L</math>. | # Bestäm <math>G</math>:s matris <math>B_{\boldsymbol{e}}</math> om <math>G</math> är en rotation <math>3\pi/2</math> i positiv led runt <math>L</math>. | ||
# Bestäm <math>A^4_{\boldsymbol{e}}.</math><!-- | # Bestäm <math>A^4_{\boldsymbol{e}}.</math><!-- | ||
| - | |||
-->{{#NAVCONTENT: | -->{{#NAVCONTENT: | ||
Svar|Svar till övning 17.38| | Svar|Svar till övning 17.38| | ||
Tips och lösning|Tips och lösning till övning 17.38}} | Tips och lösning|Tips och lösning till övning 17.38}} | ||
| + | |||
| + | |||
| + | '''''Du kan visualisera uppgift 17.38 genom att klicka på bilden.''''' | ||
| + | |||
| + | <imagemap> | ||
| + | Bild:Ex1738a.png|450px|alt=Alt text | ||
| + | default [http://webcourses.itn.liu.se/webkurs/Ex1738a.jnlp Du kan visualisera uppgift 17.38] | ||
| + | </imagemap> | ||
| + | |||
Nuvarande version
| 16.1 | 16.2 | 16.3 | 16.4 | 16.5 | 16.6 | 16.7 | 16.8 | 16.9 | 16.10 | 16.11 |
Läs textavsnitt 16.11 Rotationer
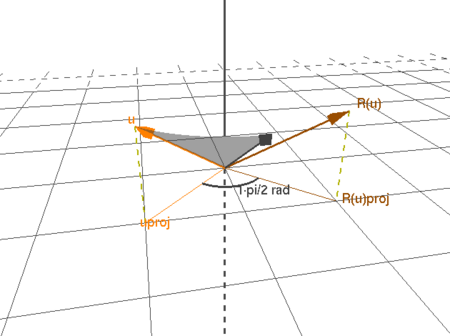
Innan Du börjar arbeta med detta moment så kan Du se en filmvisning om rotation genom att klicka på bilden.
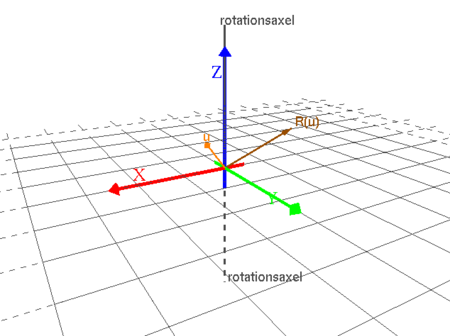

Du kan visualisera rotation genom att klicka på bilden.

Övningar
17.37 Givet en höger ON-bas i rummet. Följande matriser definierar linjära avbildningar i rummet. Beskriv geometriskt vad dessa gör.
A_1=\left(\begin{array}{rrr} 1&0 & 0\\ 0& 0& 0\\ 0& 0& 1\end{array}\right)\qquad A_2=\left(\begin{array}{rrr} 1& 0& 0\\ 0& 3& 0\\ 0& 0& 1\end{array}\right)\qquad A_3=\left(\begin{array}{rrr} 1& 0& 0\\ 0& \cos\theta& -\sin\theta\\ 0& \sin\theta& \cos\theta\end{array}\right)
 Hämtar...
Hämtar...
17.38 Låt \displaystyle \underline{\boldsymbol{e}} vara en höger ON-bas i rummet och låt en rotationsaxel \displaystyle L vara parallell med vektorn \displaystyle 2\boldsymbol{e}_1+2\boldsymbol{e}_2-\boldsymbol{e}_3.
- Bestäm \displaystyle F:s matris \displaystyle A_{\boldsymbol{e}} om \displaystyle F är en rotation \displaystyle \pi/2 i positiv led runt \displaystyle L.
- Bestäm \displaystyle G:s matris \displaystyle B_{\boldsymbol{e}} om \displaystyle G är en rotation \displaystyle 3\pi/2 i positiv led runt \displaystyle L.
- Bestäm \displaystyle A^4_{\boldsymbol{e}}.
Du kan visualisera uppgift 17.38 genom att klicka på bilden.


17.39. Låt \displaystyle \underline{\boldsymbol{e}} vara en höger ON-bas i rummet och \displaystyle F rotation \displaystyle 2\pi/3 i positiv led runt \displaystyle \boldsymbol{e}_1+\boldsymbol{e}_2+\boldsymbol{e}_3. Beräkna avbildningens matris i basen \displaystyle \underline{\boldsymbol{e}}.
Reflektionsuppgifter
1. Beskriv hur en rotationsmatris är uppbyggd.
2. Hur åstadkommer du rotation moturs respektive medurs?
